Electric UAV with Retractable VTOL System
For my aerospace degree final year project, I carried out the design and testing of a small scale electric UAV with a retractable VTOL system. The purpose was to explore the feasibility of retracting the VTOL propulsion system into the fuselage, in order to significantly reduce cruise drag compared with existing UAVs at this scale.
Over the course of 6 months I conceived, designed and built a complete aircraft to explore this question. This was a fast paced, multifaceted project spanning aerodynamic design, custom VTOL design algorithms, precision actuator design, PCB design, control software development, carbon fiber composites manufacturing, CNC machining and flight testing.
The aircraft was successfully test flown with results showing that a retraction mechanism for the VTOL system can be integrated, such that the drag reduction and hence range increase benefit, significantly outweighs the mass penalty of the mechanism.
See below video for project details including, design, manufacture and flight testing phases.
Project Gallery
PRELIMINARY DESIGN

Mission profile that the aircraft was optimised for

Output from custom developed eVTOL design tool

Aircraft drag polar

Inviscid CFD analysis results

Wing design properties
DETAILED DESIGN

Main fuselage structure and VTOL system

Custom designed miniature low backlash linear actuator

Nested fuselage parts ready for laser cutting

FEA analysis of main VTOL boom clevis

Linkage geometry and force modelling in Matlab

Cut away view showing retraction mechanism

Boom clevis manufacturing drawing

Boom pivot, linear actuator linkage and adjustable limit switches

Custom PCB schematic
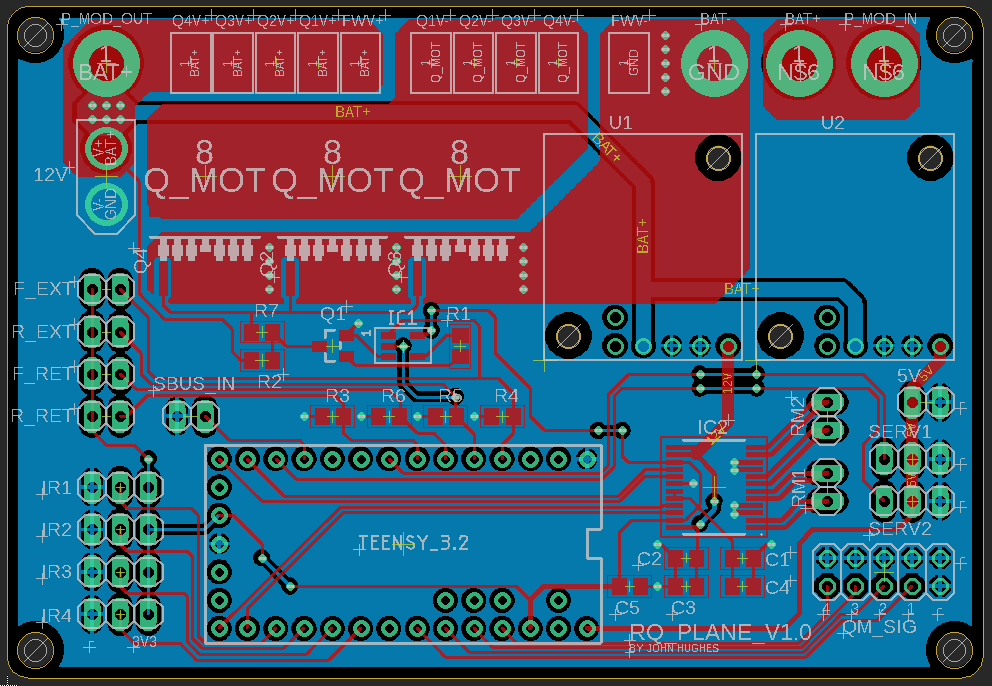
PCB Layout
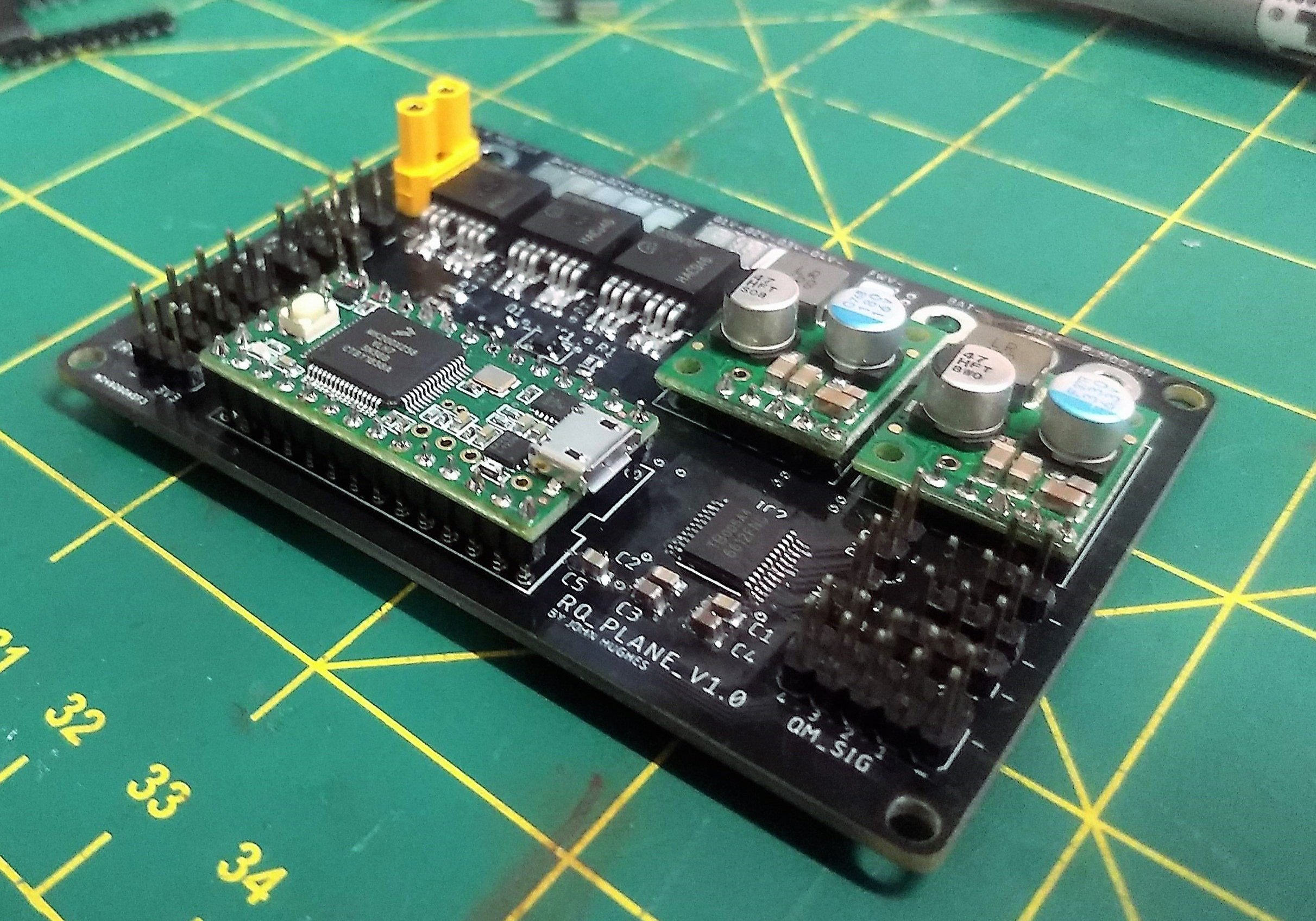
Completed PCB
MANUFACTURE

Fabrics, foam cores and mold beds ready for layup of wing and tail
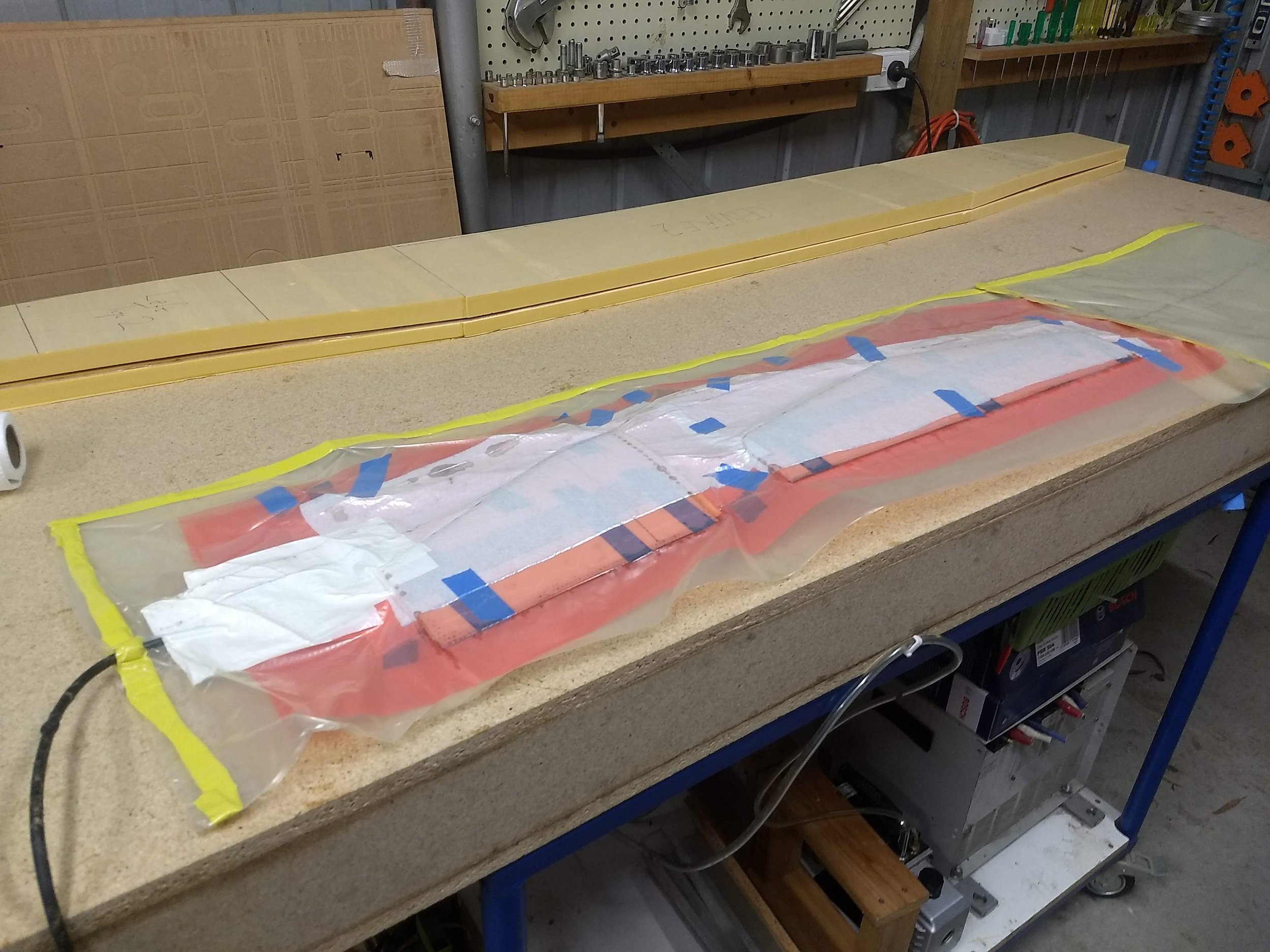
Tail in vacuum bag ready for curing

Roughing out boom clevis parts using a waterjet cutter
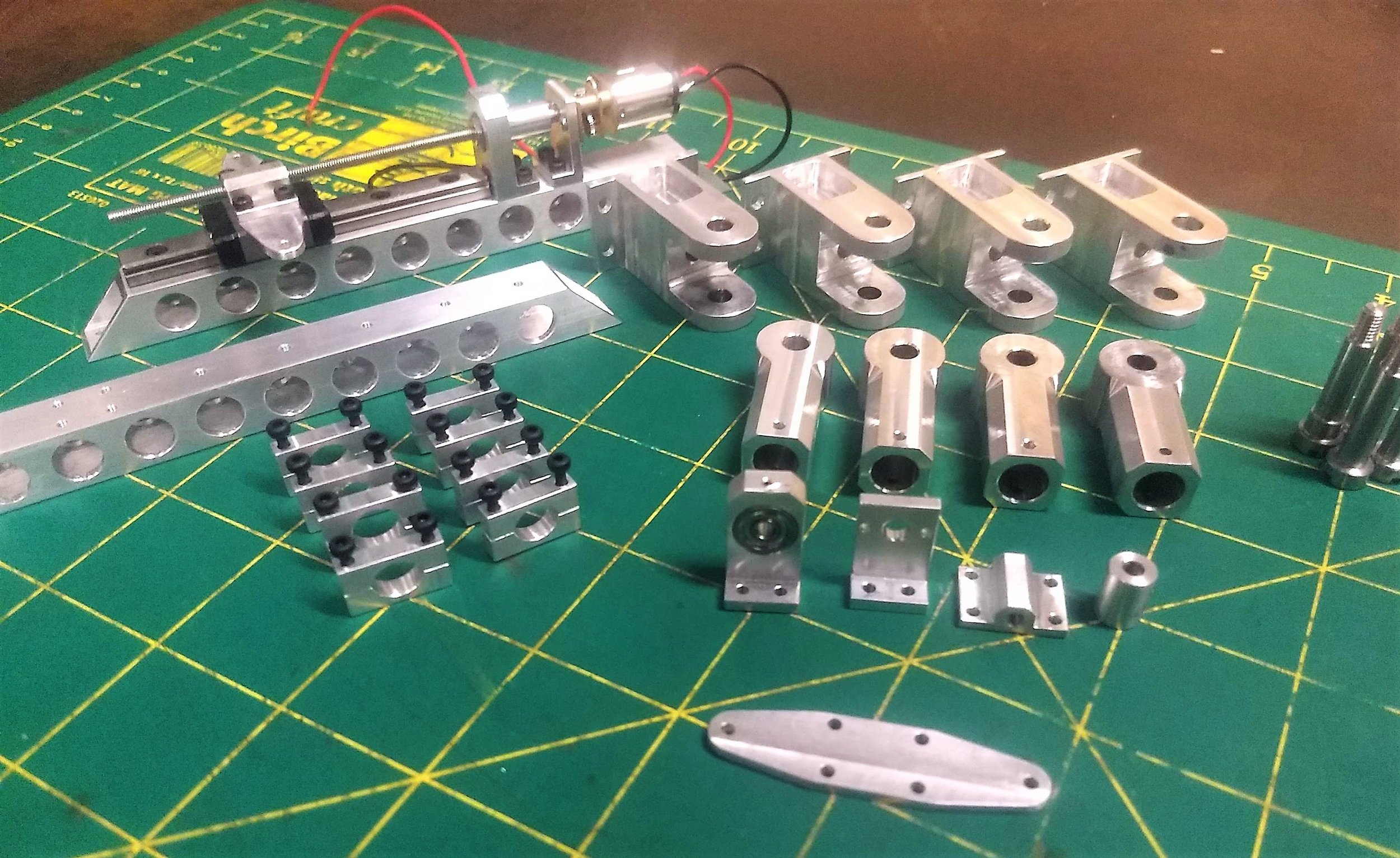
Complete set of custom machined parts made for the project

Hot wire cutting wing foam core

Fuselage structure mid assembly
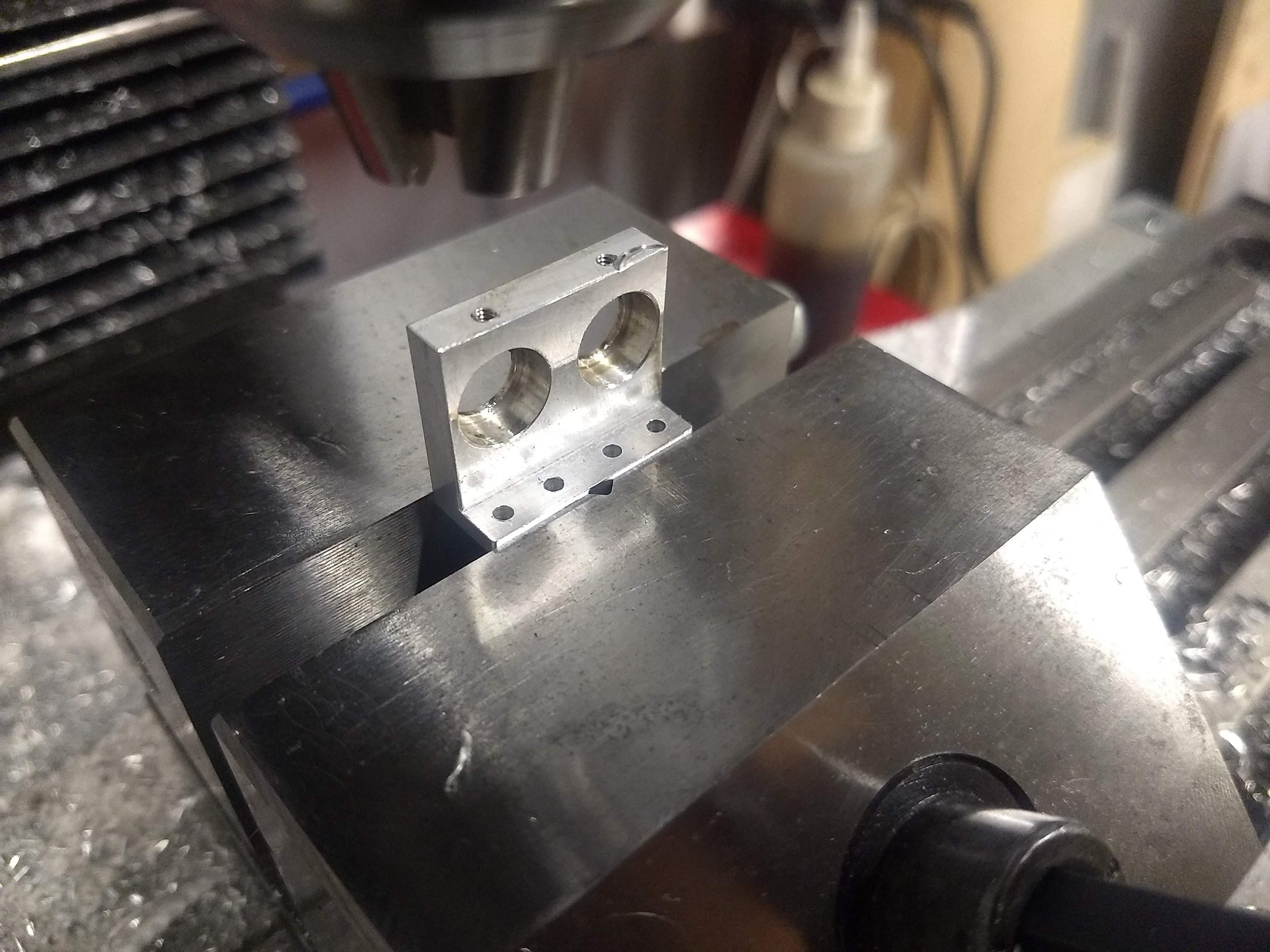
Machining bearing mount blocks for the linear actuator mechanism